


Mars Rovers
Pragmatic workhorses
Conceptual Project

NASA Rover — Compact Recon Platform
Proportion:Low-slung, wide-track configuration with a centralized mass and minimal overhangs. The cab sits deep between large, equal-diameter wheels — emphasizing stability, traction, and mechanical density.
Surfaces:Taut, faceted armor with shallow curvature; surfaces transition through precise bevels and sealed seams. The top shell reads as a single protective carapace floating above an exposed, functional chassis.
Lines:Angular, converging geometries create a forward-tapered wedge. Strong diagonals, including the red NASA stripe, reinforce directional tension and motion.
Stance:
Aggressive yet balanced. Broad wheelbase and compressed vertical proportion convey low gravity adaptability and power efficiency.
Character:Compact, purposeful, and tactical — a high-performance reconnaissance rover. It communicates speed, precision, and self-sufficiency through a dense, muscular form language and luminous, high-tech detailing.
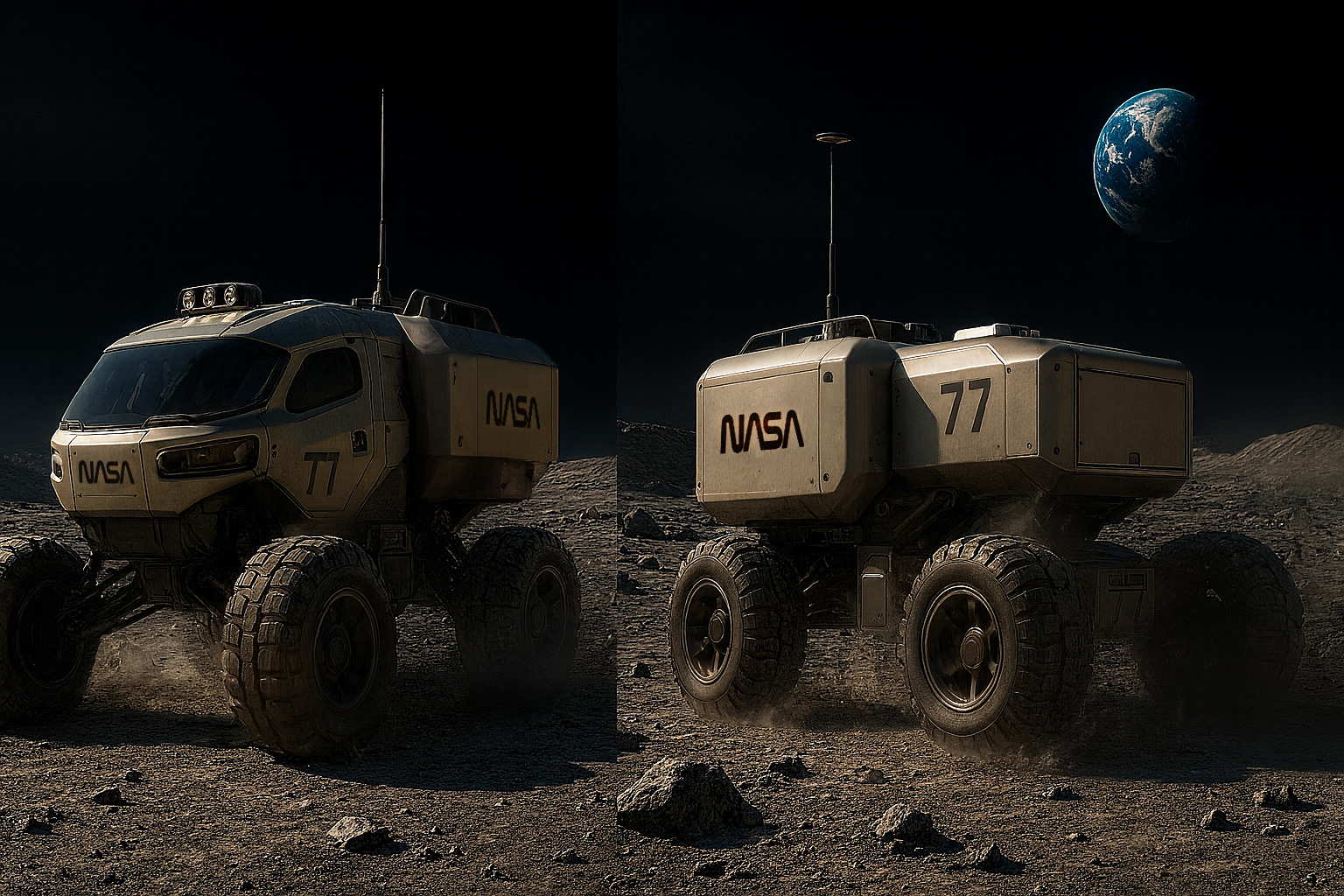
Moon Scout Utility Rovers
- Proportion & Stance: One-box capsules perched high on long-travel, exposed suspensions. Short overhangs for approach/departure, wheels visually “at the corners.”
- Graphic Theme: Dark “visor” windshields and a continuous black lower belt that reads like an exo-frame/skid module. Slim, horizontal DRLs for a techy light signature.
- CMF: Ceramic-white body panels with basalt/graphite lower armor; satin/cerakote vibe with matte, dust-tolerant finishes and visible fasteners.
- Lunar logic cues: Non-pneumatic/large-void treads, generous chamfers to shed regolith, and simplified panel breaks for glove-friendly service.
- Brand language: The thin-brow DRLs + black visor + pale armor creates a coherent family. The lower exo-frame as the signature—functionally and visually.
- Human factors: Door apertures and sill heights look high; integrate deployable footpads and wide, glove-friendly latches.
- Thermal & dust: Show radiator/radiator-panel logic (roof or side louvers) and deliberate dust-shedding bevels at every horizontal ledge.
- Serviceability: External fasteners are great—color-code critical access points and standardize bolt patterns across the fleet.
- Powertrain read: Visual cues suggest in-wheel motors; reinforce with visible hub covers, cable routing bosses, or cooling fins.
- Safety: Add high-contrast edge markers and redundant light strips for low-sun, high-glare conditions.
Character:
Rational, engineered, and utilitarian — a pure mission tool. Its visual language communicates endurance, clarity, and trustworthiness; a functional archetype for lunar operations.
Proportion:
Compact, two-box architecture with balanced mass distribution. A short, pressurized cab leads a squared utility module, both riding high on widely spaced wheels for stability and clearance.
Surfacing:
Pure, planar volumes intersected by clean bevels. Minimal curvature emphasizes industrial precision and structural honesty. Upper forms are clean and sealed; lower body expresses mechanical exposure and robustness.
Lines:
Orthogonal and disciplined — strong horizontals define the belt and roof, with subtle diagonals for articulation. All lines reinforce modular logic and manufacturable geometry.
Stance:
Tall, composed, and confident. Wide track and short overhangs convey capability and grounded assurance without aggression.

Mars modular ecosystem of expedition vehicles
Form Language: Unified by a geometric, aerospace-industrial aesthetic — taut monocoque shells over visible mechanical frameworks.
Line Strategy: Consistent use of strong horizontals, controlled diagonals, and slim DRL bands defining a technological identity.
Proportion Hierarchy: From agile compact → balanced expedition → dominant hauler — a clear, scalable progression.
Character DNA: All express precision, capability, and engineered realism, with color-coded illumination defining operational tiers (blue for exploration, red for mission-critical, neutral for logistics).

Proportion:
Tight, short wheelbase with a strong cab-forward layout; large wheel-to-body ratio communicates agility and terrain adaptability.
Surfaces:
Continuous, armored canopy integrated into the body. Clean surface transitions with sharp perimeter bevels; upper forms feel pressurized and aerodynamic.
Lines:
Dynamic diagonals and converging front lines give a forward thrust. LED signatures emphasize width and control.
Stance:
Low, athletic, and ready — a confident, high-grip posture.
Character:
Exploratory and reactive — a fast, autonomous scout designed for rapid terrain mapping.
Proportion:
Longer cabin and extended rear volume balance crew space with mobility; large-diameter tires sustain scale coherence.
Surfaces:
More segmented shell — deliberate breaks between functional zones. Faceted armor panels give a modular, field-serviceable look.
Lines:
Clean horizontals run the body length, anchored by acute diagonals framing doors and lighting. Red lighting accents signal operational hierarchy and visibility.
Stance:
Commanding and upright — grounded mass but forward-biased for drive intent.
Character:
Operational centerpiece — a pressurized exploration rover, equal parts mobility and endurance.


Proportion:
Extended wheelbase and 6×6 layout communicate capacity and authority. The forward cab remains consistent with family identity while rear modules scale modular functionality.
Surfaces:
Pure geometric continuity — upper forms smooth and monolithic, lower chassis exposed and mechanical. Industrial-grade realism with clear segmentation of functional zones.
Lines:
Strong longitudinal emphasis; repeating horizontal bands and light strips create visual rhythm and scalability.
Stance:
Massive, deliberate, and stable. Low pitch, minimal rake, engineered for heavy load and traction.
Character:
Resilient and dependable — a long-range logistics rover, the backbone of extended missions and base support.
Proportion: Elongated 6×6 configuration with a compact cab-to-body ratio. The mass is visually rear-biased, emphasizing payload and range. Wide track and large-diameter wheels stabilize the tall profile and extended overhang.
Surfaces: Streamlined monocoque shell with disciplined curvature and clean panel separations. The cabin’s upper surfaces flow continuously into the rear module, giving aerodynamic unity despite its volume. Matte, ceramic-like finishes enhance structural realism.
Stance:
Composed and authoritative. The vehicle sits firmly on its suspension, exuding weight and mechanical confidence. Its low rake and long wheelbase communicate endurance over agility.
Character:
Purpose-built and commanding — a long-range expedition and logistics rover. It conveys capability, autonomy, and operational permanence — a mobile base rather than a simple transport. The illuminated geometry and cohesive surfacing express precision-engineered functionality under extreme conditions.


Proportion:
Compact, low-profile volume with a rearward cabin mass and extended front wedge. Short overhangs and a wide stance emphasize maneuverability and structural integrity.
Surfaces:
Purely faceted, almost architectural surfacing. The body panels are crisp, planar, and tightly joined, evoking precision machining. Minimal curvature reinforces a hard-shell, exoskeletal logic.
Lines:
Linear and geometric — converging diagonals form a strong forward wedge and align with functional breaks. Subtle horizontal seams express modularity and access panels.
Stance:
Low, planted, and mechanical — a vehicle that feels rigid and poised for controlled articulation.
Character:
Minimalist and utilitarian — a fast reconnaissance platform designed around efficiency and manufacturability. Its aesthetic blends aerospace discipline with robotic pragmatism, expressing clarity, speed, and engineered intent.